Publications
Publications can also be found at our Google Scholar.
2025
Variable Stiffness and Variable Size Particles for Reconfigurable Granular Metamaterials
Monica S. Li, Brian H. Do, Caitlin L. Le, Cory S. O’Hern, Rebecca Kramer-Bottiglio. Variable Stiffness and Variable Size Particles for Reconfigurable Granular Metamaterials. IEEE International Conference on Soft Robotics.
2024
A Motion Planner for Growing Reconfigurable Inflated Beam Manipulators in Static Environments
Rawad EH Altagiuri, Omar HA Zaghloul, Brian H. Do, and Fabio Stroppa. A Motion Planner for Growing Reconfigurable Inflated Beam Manipulators in Static Environments. Robotics and Automation Letters.

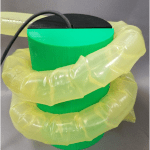
Stiffness Change for Reconfiguration of Inflated Beam Robots
Brian H. Do, Shuai Wu, Renee R. Zhao, and Allison M. Okamura. Stiffness Change for Reconfiguration of Inflated Beam Robots. Soft Robotics.
Interaction Behaviors of a Vine Robot in a Pipe T-Junction
Lily Behnke, Brian H. Do, Sofia Eristoff, and Rebecca Kramer-Bottiglio. Interaction Behaviors of a Vine Robot in a Pipe T-Junction. IEEE International Conference on Soft Robotics.
2023
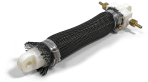
Passive Shape-Locking for Multi-Bend Growing Inflated Beam Robots
2022
An All-Soft Variable Impedance Actuator Enabled by Embedded Layer Jamming
A Lightweight, High-Extension, Planar 3-Degree-of-Freedom Manipulator Using Pinched Bistable Tapes
A Large Area Wearable Soft Haptic Device Using Stacked Pneumatic Pouch Actuation

Task-Specific Design Optimization and Fabrication for Inflated-Beam Soft Robots with Growable Discrete Joints
2021

Macro-Mini Actuation of Pneumatic Pouches for Soft Wearable Haptic Displays
2020
Dynamically Reconfigurable Discrete Distributed Stiffness for Inflated Beam Robots